 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 更多“方向舵面是用驱动()”相关的问题
更多“方向舵面是用驱动()”相关的问题
第1题
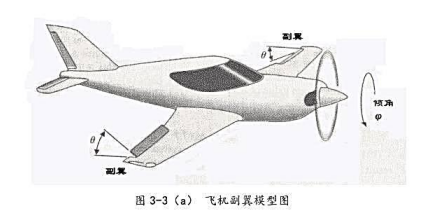
这里所要讨论的自动驾驶仪是一个自动控制系统,它通过调节副翼表面来控制倾角φ,只要使副翼表面产生一个θ的变形,气压在这些表面上会产生一个扭矩,使飞机产生侧滚。飞机副翼是由液压操纵杆来控制的,后者的传递函数为1/s。
测量实际的倾角φ,并与输入设定值进行比较,其差值被用来驱动液压操纵杆,而液压操纵杆则反过来又会引起副翼表面产生变形。
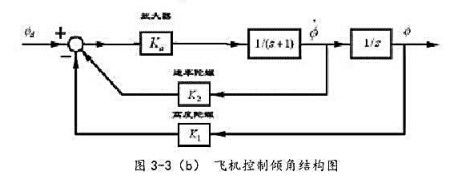
为简单化起见,这里假定飞机的侧滚运动与其他运动无关,其结构图如图3-3(b)所示,又假定K1=1,且角速率φ由速率陀螺将其值进行反馈,期望的阶跃响应的超调量σ%≤10%,调节时间(以±2%的标准)ts≤9s,试选择合适的Ka和K2值。
第2题
A. 备用方向舵关断活门
B. 备用前缘装置关断活门
C. EDP供油关断活门
D. PTU(动力转换组件)控制活门
第7题
B.用木板将副翼、升降舵和方向舵之间缝隙夹紧
C.通过一定方式将驾驶盘、驾驶杆和脚蹬固定
D.利用锁销将传动机构锁紧固定

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!


































