 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A.只有两个要素:状态、连接
B.状态空间图不一定总能“画出来”
C.问题的解的形式不是一定要定义的
D.对于简单问题,可以直接构造状态图
 更多“关于状态空间图,说法错误的是”相关的问题
更多“关于状态空间图,说法错误的是”相关的问题
第1题
A、将一个复杂问题表示成多个连续的状态
B、状态之间的连接指的是衔接、转移、导致等关系
C、将状态和连接合在一起可以构成状态图
D、状态空间图未必一定能画出来
第2题
已知系统状态空间描述为: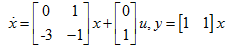 下述说法错误的是( )
下述说法错误的是( )
A、该系统是单输入单输出的二阶线性定常系统。
B、该系统是不能控的。
C、该系统是既能控又能观的。
D、该系统是内部稳定的。
第3题
已知线性定常系统状态空间描述为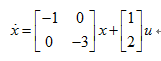 下述说法错误的是( )
下述说法错误的是( )
A、系统的特征值为-1,-3
B、该系统有多个平衡态。
C、系统的李亚普诺夫方程为:
D、该系统是李雅普诺夫意义下渐近稳定的。
第4题
A、空间校正每次只能矫正一个图层。
B、空间校正每次可以矫正多个图层。
C、空间校正的目标图层必须处于编辑状态。
D、空间校正的要素类一般是要素类或shapefile。
第5题
对线性系统的状态空间表达式进行非奇异线性变换 ,下述说法错误的是( ):
,下述说法错误的是( ):
A、非奇异线性变换不改变系统的特征根;
B、非奇异线性变换不改变系统的传递函数矩阵;
C、非奇异线性变换不改变系统的状态空间描述;
D、矩阵P是同一线性空间两组不同状态变量之间的线性变换矩阵;
第6题
对线性系统的状态空间表达式进行非奇异线性变换,下述说法错误的是( ):
A、非奇异线性变换不改变系统的特征根;
B、非奇异线性变换不改变系统的传递函数矩阵;
C、非奇异线性变换不改变系统的状态空间描述;
D、矩阵P是同一线性空间两组不同状态变量之间的线性变换矩阵;
第7题
A.仅Ⅳ、V和Ⅵ
B.仅工和V
C.仅Ⅱ和Ⅲ
D.仅I、Ⅱ和Ⅳ
第8题
A、0
B、1
C、2
D、3
第9题
A、状态通常可以用矢量形式表示
B、操作算子能使问题由一个状态变成另一个状态。
C、状态空间图是一个无向图。
D、状态指的是搜索过程中所有可能达到的合法状态的集合
第10题
A.工作状态包括ARM状态、Thumb及Thumb-2状态和调试状态三种
B.ARM状态既支持16位指令宽度也支持32位指令宽度
C.Thumb状态或Thumb-2状态下代码密度大于ARM状态,占用存储空间较小
D.ARM处理器复位后总处于ARM状态

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































