重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
在图示机构中已知凸轮以 的角速度顺时针方向转动,试判断下列哪个选项用瞬心法求出从动件3的速度分析步骤及方法是错误的?
的角速度顺时针方向转动,试判断下列哪个选项用瞬心法求出从动件3的速度分析步骤及方法是错误的?
A、瞬心 位于凸轮1的转动轴心处,瞬心
位于凸轮1的转动轴心处,瞬心 位于垂直于从动件3导路的无穷远处,而瞬心
位于垂直于从动件3导路的无穷远处,而瞬心 位于过点的水平线和过凸轮高副接触点公法线的交点处
位于过点的水平线和过凸轮高副接触点公法线的交点处
B、从动件3的速度 的方向为沿其导路向上方向
的方向为沿其导路向上方向
C、该机构共有3个瞬心:、和
D、由瞬心概念可得,从动件3的速度大小
 更多“在图示机构中已知凸轮以[图]的角速度顺时针方向转动,...”相关的问题
更多“在图示机构中已知凸轮以[图]的角速度顺时针方向转动,...”相关的问题
第1题
在图示机构中已知凸轮以 的角速度顺时针方向转动,试判断下列哪个选项用瞬心法求出从动件3的速度分析步骤及方法是错误的?
的角速度顺时针方向转动,试判断下列哪个选项用瞬心法求出从动件3的速度分析步骤及方法是错误的?
A、瞬心 位于凸轮1的转动轴心处,瞬心
位于凸轮1的转动轴心处,瞬心 位于垂直于从动件3导路的无穷远处,而瞬心
位于垂直于从动件3导路的无穷远处,而瞬心 位于过点的水平线和过凸轮高副接触点公法线的交点处
位于过点的水平线和过凸轮高副接触点公法线的交点处
B、从动件3的速度 的方向为沿其导路向上方向
的方向为沿其导路向上方向
C、该机构共有3个瞬心:、和
D、由瞬心概念可得,从动件3的速度大小
第2题
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ′0、远休止角δ′8和近休止角δ′8.
第3题
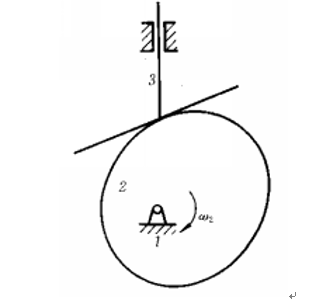
A、该机构共有3个瞬心:P12、P13和P23
B、瞬心P12位于凸轮1的转动轴心处,瞬心P13位于垂直于从动件3导路的无穷远处,而瞬心P23位于过P12点的水平线和过凸轮高副接触点公法线的交点处
C、由瞬心P23概念可得,从动件3的速度大小v3 = ω2P23
D、从动件3的速度v3的方向为沿其导路向下
第4题
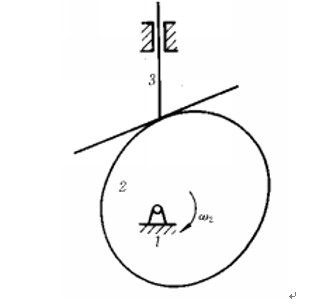
A、该机构共有3个瞬心:P12、P13和P23
B、瞬心P12位于凸轮1的转动轴心处,瞬心P13位于垂直于从动件3导路的无穷远处,而瞬心P23位于过P12点的水平线和过凸轮高副接触点公法线的交点处
C、由瞬心P23概念可得,从动件3的速度大小v3 = vP23 =ω1 μl m/s
D、从动件3的速度v3的方向为沿其导路向上
第5题

A、该机构共有3个瞬心:P12、P13和P23
B、瞬心P12位于凸轮1的转动轴心处,瞬心P13位于垂直于从动件3导路的无穷远处,而瞬心P23位于过P12点的水平线和过凸轮高副接触点公法线的交点处
C、由瞬心P23概念可得,从动件3的速度大小v3 = vP23 =ω1 *P13P23*μl m/s
D、从动件3的速度v3的方向为沿其导路向上
第6题

A、该机构共有3个瞬心:P12、P13和P23
B、瞬心P12位于凸轮1的转动轴心处,瞬心P13位于垂直于从动件3导路的无穷远处,而瞬心P23位于过P12点的水平线和过凸轮高副接触点公法线的交点处
C、由瞬心P23概念可得,从动件3的速度大小v3 = vP23 =ω1 μl m/s
D、从动件3的速度v3的方向为沿其导路向上
第7题
在图所示的凸轮机构中,已知凸轮1以等角速度ω1=10rad/s2转动。凸轮为一偏心圆,其半径R=25mm,lAB=15mm,lAD=50mm,φ1=90°。试用图解法求构件2的角速度ω2。
(提示:可先将机构进行高副低代,然后对其替代机构进行运动分析。)

第9题
如图所示的凸轮机构中,已知R=50mm,lOA=20mm,lAC=80mm,∠OAC=90°,凸轮1以等角速度ω1=10rad/s逆时针转动。
试用瞬心法求从动件2的角速度ω2;

第10题
试以作图法设计一个对心平底直动推杆盘形凸轮机构凸轮的轮廓曲线。设已知凸轮基圆半径rn=30mm,推杆平底与导轨的中心线垂直,凸轮顺时针方向等速转动。当凸轮转过120°~1~r推杆以余弦加速度运动上升20mm,再转过150°时,推杆又以余弦加速度运动回到原位,凸轮转过其余90°时,推杆静止不动。问这种凸轮机构压力角的变化规律如何?是否也存在自锁问题?若有,应如何避免?

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!