 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
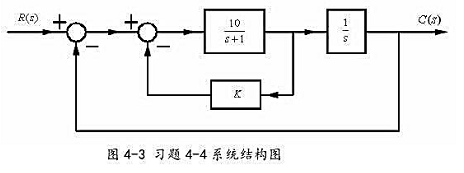
给定控制系统如图4-3所示,K≥0,试用系统的根轨迹图确定,速度反馈增益K为何值时能使闭环系统极点阻尼比等于0.7。
 更多“给定控制系统如图4-3所示,K≥0,试用系统的根轨迹图确定,速度反馈增益K为何值时能使闭环系统极点”相关的问题
更多“给定控制系统如图4-3所示,K≥0,试用系统的根轨迹图确定,速度反馈增益K为何值时能使闭环系统极点”相关的问题
第2题
已知反馈控制系统中,其开环传递函数为: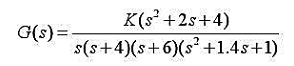 。
。
(1)绘制H(s)=(s+4)/s时的闭环根轨迹概略图;
(2)绘制H(s)=(s+1.05)/s时的闭环根轨迹概略图;
(3)比较开环零点变化对根轨迹形状的影响。
第4题
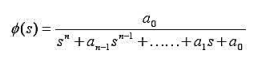
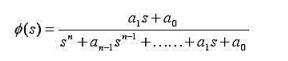
已知闭环传递函数的一般形式为

误差定义为e(t)=r(t)-c(t),试证:
(1) 系统在阶跃信号输入下,稳态误差为零的充分条件为
(2) 系统在斜坡信号输入下,稳态误差为零的充分条件为
(3)推导系统在斜坡信号输入下稳态误差为零的充分条件;
(4)求出系统闭环传递函数与系统型别之间的关系。
第7题
如图3-2所示的控制系统结构图,误差E(s)在输入端定义,扰动输入n(t)=2×1(t)。
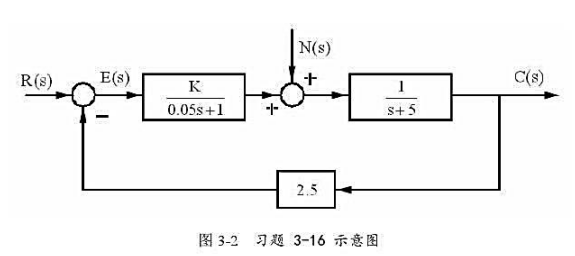
(1) 试求K=40时,系统在扰动输入下的稳态输出和稳态误差。
(2)若K=20,其结果又如何?
(3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有何影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有何影响?
第8题
已知单位反馈系统的开环传递函数为:
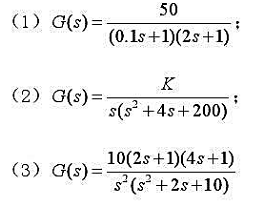 。
。
试求位置误差系数Kp,速度误差系数Kv,加速度误差系数Ka。
第9题
设单位反馈系统的开环传递函数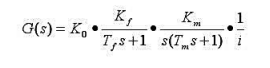 ,输入信号为r(t)=(a+bt)?1(t),其中K0,Km,Kf,i,Tf,Tm均为正数,a和b为已知正常数。如果要求闭环系统的稳态误差
,输入信号为r(t)=(a+bt)?1(t),其中K0,Km,Kf,i,Tf,Tm均为正数,a和b为已知正常数。如果要求闭环系统的稳态误差 试求系统各参数满足的条件。
试求系统各参数满足的条件。
第10题

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

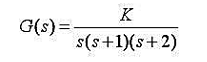 ,K的变化范围是0→∞试画出系统的根轨迹图。
,K的变化范围是0→∞试画出系统的根轨迹图。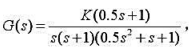 ,试确定系统稳定时的K值范围。
,试确定系统稳定时的K值范围。 试确定系统的阻尼比ζ和自然频率ωn。
试确定系统的阻尼比ζ和自然频率ωn。





























