 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A.机床原点
B.换刀点
C.工件原点
D.以上都不是
 答案
答案
 纠错
纠错
 更多“一个零件程序除了加工某个零件外,还能对加工与其相似的其他零件有参考价值,可提高()编程能力”相关的问题
更多“一个零件程序除了加工某个零件外,还能对加工与其相似的其他零件有参考价值,可提高()编程能力”相关的问题
第5题
| xi | 0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| yi | 0.6 | 2.0 | 4.4 | 7.5 | 11.8 | 17.1 | 23.3 | 31.2 | 39.6 | 49.7 | 61.7 |
求这段曲线的纵坐标y关于横坐标x的二次多项式回归方程.
第6题
1. 某数控车床配置FANUC数控系统,用外径粗加工复合循环加工一典型零件。工件坐标系设在右端面,循环起始点在A(100,3),切削深度为3.0mm,X方向精加工余量为0.6mm(直径值),Z方向精加工余量为0.3mm。零件的部分形状已给出,其中点划线部分为工件毛坯(见下图)。请仔细阅读程序,完成下列内容。 (1)根据程序中的尺寸数据,画出该零件的几何图形并标注尺寸,画出零件的工件坐标系。 (2)填空:执行该程序,粗加工时的主轴转速为 ,进给速度为 ;精加工时的主轴转速为 ,进给速度为 ;G70语句的含义是: ;粗加工X方向的加工余量是 。 程 序 注 释 O5101; N010 G00 T0101 X120 Z60; N020 S500 M03; N030 G00 X100 Z3; N040 G71 P50 Q140 U0.6 W0.3 D3.0 F200; N050 G00 X18 S800; N060 G01 X30 Z-3 F100; N070 Z-12; N080 G02 X36 Z-15 R3; N090 G01 X44; N100 G03 X54 Z-20 R5; N110 G01 W-10; N120 G02 X70 Z-38 R8; N130 G01 W-12; N140 X90 W-10; N150 G70 P50 Q140; N160 G00 X120 Z60; N170 M05; N180 M30; 程序号 选定刀具及刀补,到起刀点位置 主轴以500r/min正转 刀具到循环起点位置 回起刀点 主轴停 程序结束并复位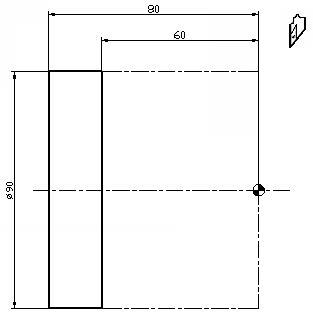
第7题
第8题
一、简答题(本大题共 5 小题,每题 6 分,共 30 分。) 1、按控制方式进行分类,数控系统可分为哪几类,其各自特点是什么? 2、简述数控机床数控装置的组成,并用框图说明一般数控机床的工作原理。 3、试述步进电机的步距角由哪些因素决定,步进电机的转向、转速和总回转角由哪些因素决定。 4、某四相步进电动机,转子上有 100 个齿,按四相四拍和四相八拍运行时,步距角各是多少度?并请写出通电相序。 5、请根据直流伺服电动机机械特性曲线说明升压调速过程。 二、数控编程(本大题共 2小题,共 25 分。) 6、编写下图所示零件数控车削精加工的程序,编程原点坐标(0,0),加工进给速度 F200,主轴转速 S500。图中的Φ65 外圆表面不加工。(绝对坐标或相对坐标编程任意选择一种)(10 分)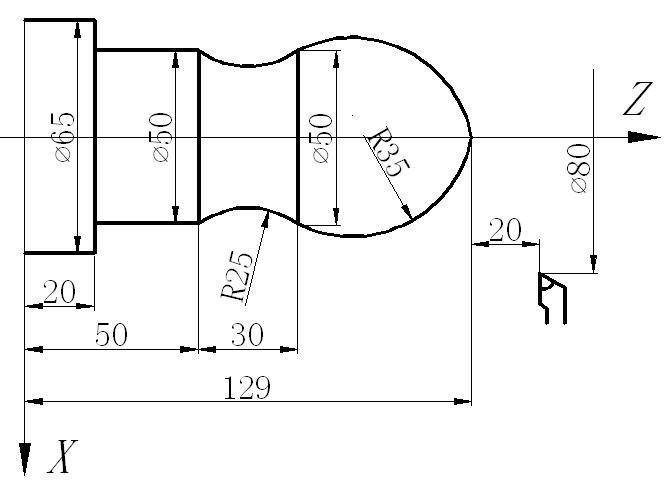 7、用Ф30 的键槽铣刀铣削工件轮廓,已知工件坐标原点 0(90,60),机床原点 M(0,0),刀具起始位置在机床原点处,工件尺寸及加工路线如图所示,对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的 X、Y、Z坐标值。 (注:主轴转速为 300rpm,进给速度为 150mm/min,机床具有刀具半径补偿 G40、G41 和 G42 功能)(15 分)
7、用Ф30 的键槽铣刀铣削工件轮廓,已知工件坐标原点 0(90,60),机床原点 M(0,0),刀具起始位置在机床原点处,工件尺寸及加工路线如图所示,对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的 X、Y、Z坐标值。 (注:主轴转速为 300rpm,进给速度为 150mm/min,机床具有刀具半径补偿 G40、G41 和 G42 功能)(15 分)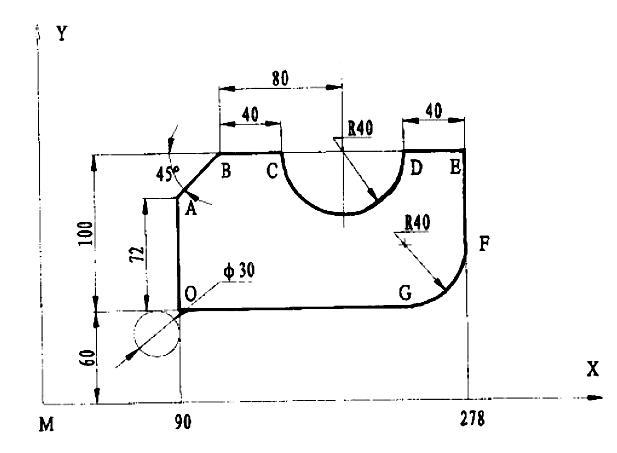 三、分析计算(本大题共 4 小题,共 35 分。) 8、若已知光栅栅距 d=0.01mm,莫尔条纹宽度 W=5mm,则莫尔条纹的放大倍数是多少?栅线角 θ是多少?(5 分) 9、设有一绝对式编码器有 10个码道,求其能分辨的最小角度是多少?若该编码器采用二进制编码,那么,11001101所对应的角度在哪个范围?(6 分) 10、如图所示,被加工圆弧的起点坐标为(4,0),终点坐标为(0,4),请写出逐点比较法插补计算过程,并在图中画出插补轨迹。 (要求给出计算公式)(12 分)
三、分析计算(本大题共 4 小题,共 35 分。) 8、若已知光栅栅距 d=0.01mm,莫尔条纹宽度 W=5mm,则莫尔条纹的放大倍数是多少?栅线角 θ是多少?(5 分) 9、设有一绝对式编码器有 10个码道,求其能分辨的最小角度是多少?若该编码器采用二进制编码,那么,11001101所对应的角度在哪个范围?(6 分) 10、如图所示,被加工圆弧的起点坐标为(4,0),终点坐标为(0,4),请写出逐点比较法插补计算过程,并在图中画出插补轨迹。 (要求给出计算公式)(12 分)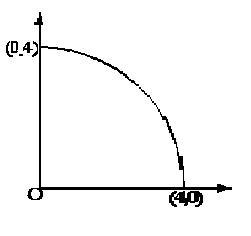 序号 偏差判别 坐标进给 偏差计算 终点判别 0 F0 = 0 X0 =4 Y0 = 0 1 2 3 4 5 6 7 8 9 10 11.请用数字积分插补算法计算下图直线的插补计算过程,并在图中画出插补轨迹。(12 分)
序号 偏差判别 坐标进给 偏差计算 终点判别 0 F0 = 0 X0 =4 Y0 = 0 1 2 3 4 5 6 7 8 9 10 11.请用数字积分插补算法计算下图直线的插补计算过程,并在图中画出插补轨迹。(12 分)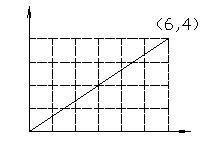 插补脉冲个数 积分值 进给方向 积分修正 终点判别 sumX=sumX+Xe sumY=sumY+Ye sumX=sumX-8 sumY=sumY-8 起点 0 0 1 2 3 4 5 6 7 8 9 10 四、综合题(本大题共 1 小题,共 10 分) 12、图示为步进电机双电压功率放大电路,试说明其工作原理, 并简述图中二极管 D1和 D2的作用。
插补脉冲个数 积分值 进给方向 积分修正 终点判别 sumX=sumX+Xe sumY=sumY+Ye sumX=sumX-8 sumY=sumY-8 起点 0 0 1 2 3 4 5 6 7 8 9 10 四、综合题(本大题共 1 小题,共 10 分) 12、图示为步进电机双电压功率放大电路,试说明其工作原理, 并简述图中二极管 D1和 D2的作用。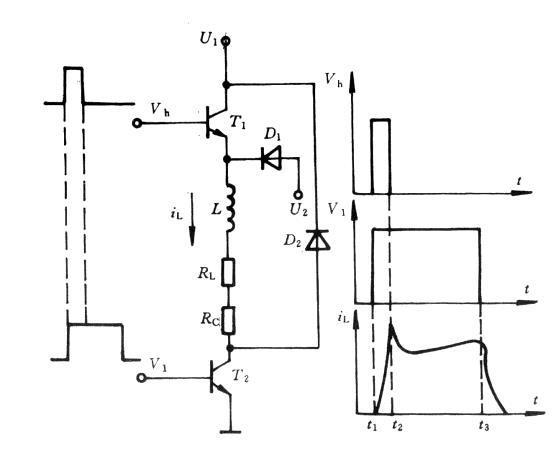

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































