 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
 ,则()
,则()A. 的零点就是系统闭环零点
的零点就是系统闭环零点
B.的零点就是系统开环极点
C.的极点就是系统开环极点
D.的极点就是系统闭环极点
 更多“2. 若闭环系统的特征式与开环传递函数的关系为,则()”相关的问题
更多“2. 若闭环系统的特征式与开环传递函数的关系为,则()”相关的问题
第1题
闭环系统的开环传递函数为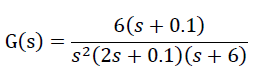 ,则该系统为:
,则该系统为:
A、0型系统,开环放大倍数K为2;
B、I型系统,开环放大倍数K为2;
C、II型系统,开环放大倍数K为1;
D、II型系统,开环放大倍数K为1。
第2题
1、已知系统的开环传递函数为,则该系统的开环增益为 ( )。
A、 50 B、25 C、10 D、5
2、下列传递函数中,为惯性环节的是( )
A、 G(s)=k/s2+s+k B 、G(s)=k
C 、 G(s)=1/s+k D、G(s)=k/s
3、系统在r(t)=t2作用下的稳态误差ess=∞,说明 ( )
A、 型别v<2; B、系统不稳定;
C、 输入幅值过大; D、闭环传递函数中有一个积分环节。
4、单位反馈系统的开环传递函数G(s)=k/s(s+1),则下列说法错误的是 ( )。
A、系统为Ⅱ型系统;
B、其闭环传递函数为G(s)=k/s2+s+k;
C、其对数幅频图的起始段斜率为[-20];
D、系统传递函数为振荡环节。
5、系统的传递函数为G(s)=5/s2+3s+2,其为__系统,系统的零点是 ___ ,极点是 ____ ,特征方程是 ____ 。
6、传递函数是指在零初始条件下、线性定常控制系统的 __与
____ 之比。
7、若系统的开环传递函数为10/s+2,其频率特性为 ———— ,其A(0) =____ , φ(0)=______ 。
二、1. 画出二阶欠阻尼系统单位阶跃响应曲线。
三、计算题
1、系统传递函数G(s)=10/(5s+1),输入r(t)=1,求其输出y(t)。
2、系统传递函数为G(s)=3s^3+12s^2+17s+20/s^5+2s^4+14s^3+88s^2+200s+800,用劳斯判据判定其稳定性
四、综合
已知反馈系统的开环传递函数为G(s)H(s)=K/s(s+1) ,
1、若给定输入r(t) = t时,要求系统的稳态误差为0.25,问开环增益K应取何值。
2、确定系统的阻尼比ζ 和固有频率ωn
3、求系统最大百分比超调量δp%,调整时间ts(误差允许5%)
第3题
第4题
第5题
A、n=p/2
B、n= p
C、n=(p+1)/2
D、n=2p
第6题
根据采样 变换的部分分式法和变换
变换的部分分式法和变换 可知,系统脉冲传递函数与传递函数的极点及重数存在一一对应关系,其中
可知,系统脉冲传递函数与传递函数的极点及重数存在一一对应关系,其中 平面原点处的极点对应
平面原点处的极点对应 平面
平面 点处的极点,且重数不变。因此比较误差采样单位反馈系统带保持器和不带保持器的两种情况, 。
点处的极点,且重数不变。因此比较误差采样单位反馈系统带保持器和不带保持器的两种情况, 。
A、保持器不影响离散系统的开环极点
B、保持器不影响离散系统的闭环极点
C、保持器影响离散系统的开环零点,也影响闭环极点
D、保持器影响离散系统的开环极点,也影响闭环极点
第7题
某系统单位斜坡输入时 ,说明该系统
,说明该系统
A、是0型系统
B、闭环不稳定
C、闭环传递函数中至少有一个积分环节
D、开环一定不稳定
第8题
火箭姿势控制的线性模型(忽略发动机的转动惯量)具有如下传递函数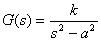 设k=1,a=1,开环系统很显然不稳定,所以需要设计控制器
设k=1,a=1,开环系统很显然不稳定,所以需要设计控制器 来使系统稳定,其结构图如题4-28图所示。(输入δ为推力的角度,输出θ是火箭的倾角)。
来使系统稳定,其结构图如题4-28图所示。(输入δ为推力的角度,输出θ是火箭的倾角)。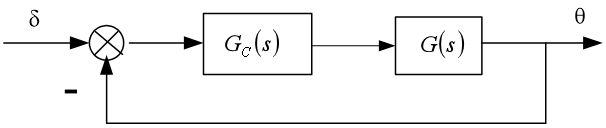 运用比例微分控制
运用比例微分控制 ,用根轨迹的方法,求出
,用根轨迹的方法,求出 和
和 的值,使闭环系统的误差带为2%时调整时间为4秒,且阻尼比
的值,使闭环系统的误差带为2%时调整时间为4秒,且阻尼比 ,正确的是()
,正确的是()
A、
B、
C、
D、
E、
第9题
控制系统的开环传递函数 ,则闭环特征方程为( )。
,则闭环特征方程为( )。
A、1+ N(s) = 0
B、N(s)+M(s) = 0
C、N(s) = 0
D、与是否为单位反馈系统有关

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 ,则该系统的闭环特征方程为 ( )。
,则该系统的闭环特征方程为 ( )。 =0
=0































