 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A.稳态误差与输入信号有关
B.稳态误差与系统的型别有关
C.系统的型别与信号的位置有关系
D.可以通过减小开环增益的方法来减小系统在输入作用下的稳态误差
 更多“下例关于稳态误差的说法错误的是”相关的问题
更多“下例关于稳态误差的说法错误的是”相关的问题
第1题
下列关于比例积分PI控制 的说法错误的是( )。
的说法错误的是( )。
A、积分作用一般不单独使用,否则可能造成系统不稳定
B、比例积分作用使系统增加了一个开环零点和一个位于坐标原点的开环极点
C、PI作用不能兼顾稳态和暂态两方面的要求
D、比例积分作用不能改善系统的稳态误差
第2题
设离散系统如图所示,设 ,
, 时,若要求其稳态误差
时,若要求其稳态误差 ,则以下说法中错误的是()
,则以下说法中错误的是()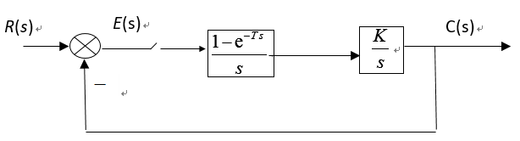
A、该系统的开环脉冲传递函数为
B、该系统的闭环脉冲传递函数为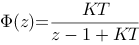
C、该系统能稳定工作。
D、闭环系统稳定时,
第3题
设离散系统如图所示,设 ,
, 时,若要求其稳态误差
时,若要求其稳态误差 ,则以下说法中错误的是()
,则以下说法中错误的是()
A、该系统的开环脉冲传递函数为
B、该系统的闭环脉冲传递函数为
C、该系统能稳定工作。
D、闭环系统稳定时,
第4题
下列关于比例积分PI控制的说法错误的是( )。
A、积分作用一般不单独使用,否则可能造成系统不稳定
B、比例积分作用使系统增加了一个开环零点和一个位于坐标原点的开环极点
C、PI作用不能兼顾稳态和暂态两方面的要求
D、比例积分作用不能改善系统的稳态误差
第5题
下列关于比例积分PI控制的说法错误的是( )。
A、积分作用一般不单独使用,否则可能造成系统不稳定
B、比例积分作用使系统增加了一个开环零点和一个位于坐标原点的开环极点
C、PI作用不能兼顾稳态和暂态两方面的要求
D、比例积分作用不能改善系统的稳态误差
第6题
A.以上说法都不对
B.一阶系统的单位阶跃响应是没有稳态误差的
C.一阶系统阶跃响应是单调上升曲线;
D.一阶系统阶跃响应特性由T确定,T越小,过渡过程进行的越快,系统的快速性越好
第7题
A、A) 先调整比例参数; B) C) D) E)
B、若稳态误差不能满足设计要求,则需加入积分控制;
C、在调整积分时间常数时,先把积分时间设定为较小值,并将整定得到的比例参数增大些,然后经过反复调整确定积分时间常数和比例系数;
D、若使用PI调节器消除了稳态误差,但动态过程仍不能满意,则可加入微分环节;
E、在整定的比例系数和积分时间常数的基础上,逐步增大微分时间常数,同时相应的改变比例系数和积分常数,逐步试凑以获得满意的调节效果;
第8题
A、比例微分的引入不会使系统对于斜坡响应的稳态误差加大。
B、速度反馈的引入不会使系统对于斜坡响应的稳态误差加大。
C、比例微分的引入可以使系统的响应速度加快,同时增大阻尼比,降低超调量。
D、比例微分的引入可以使系统的响应速度变慢,但能增大阻尼比,降低超调量。
E、速度反馈控制的闭环传递函数没有零点,因此速度反馈输出响应的平稳性较比例微分优越。
第10题
1、已知系统的开环传递函数为,则该系统的开环增益为 ( )。
A、 50 B、25 C、10 D、5
2、下列传递函数中,为惯性环节的是( )
A、 G(s)=k/s2+s+k B 、G(s)=k
C 、 G(s)=1/s+k D、G(s)=k/s
3、系统在r(t)=t2作用下的稳态误差ess=∞,说明 ( )
A、 型别v<2; B、系统不稳定;
C、 输入幅值过大; D、闭环传递函数中有一个积分环节。
4、单位反馈系统的开环传递函数G(s)=k/s(s+1),则下列说法错误的是 ( )。
A、系统为Ⅱ型系统;
B、其闭环传递函数为G(s)=k/s2+s+k;
C、其对数幅频图的起始段斜率为[-20];
D、系统传递函数为振荡环节。
5、系统的传递函数为G(s)=5/s2+3s+2,其为__系统,系统的零点是 ___ ,极点是 ____ ,特征方程是 ____ 。
6、传递函数是指在零初始条件下、线性定常控制系统的 __与
____ 之比。
7、若系统的开环传递函数为10/s+2,其频率特性为 ———— ,其A(0) =____ , φ(0)=______ 。
二、1. 画出二阶欠阻尼系统单位阶跃响应曲线。
三、计算题
1、系统传递函数G(s)=10/(5s+1),输入r(t)=1,求其输出y(t)。
2、系统传递函数为G(s)=3s^3+12s^2+17s+20/s^5+2s^4+14s^3+88s^2+200s+800,用劳斯判据判定其稳定性
四、综合
已知反馈系统的开环传递函数为G(s)H(s)=K/s(s+1) ,
1、若给定输入r(t) = t时,要求系统的稳态误差为0.25,问开环增益K应取何值。
2、确定系统的阻尼比ζ 和固有频率ωn
3、求系统最大百分比超调量δp%,调整时间ts(误差允许5%)

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































