重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
常用的数据模型不包括( )。
A) 层次模型 B) 网状模型 C) 树状模型 D) 关系模型
 更多“常用的数据模型不包括()。 A) 层次模型 B) 网状模型 C) 树状模型 D) 关系模型”相关的问题
更多“常用的数据模型不包括()。 A) 层次模型 B) 网状模型 C) 树状模型 D) 关系模型”相关的问题
第1题
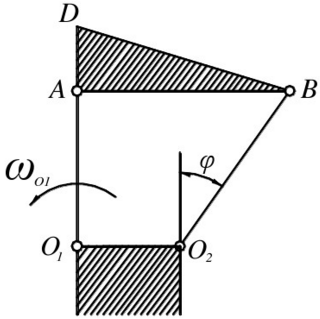
图示四连杆机构中,连杆A上固联一块三角形板ABD,机构由曲柄O1A带动.已知曲柄的角速度 ,曲柄O1A=100mm,水平距离O1O2=50mm,AD=50mm;当O1A铅垂时,AB平行于O1O2,且AD与AO1在同一直线上,角φ=30°.求三角形板ABD的角速度和D点的速度.
,曲柄O1A=100mm,水平距离O1O2=50mm,AD=50mm;当O1A铅垂时,AB平行于O1O2,且AD与AO1在同一直线上,角φ=30°.求三角形板ABD的角速度和D点的速度.
第2题
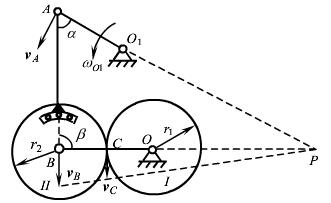
在瓦特行星传动机构中,平衡杆O1A绕O1轴转动,并借连杆AB带动曲柄OB;而曲柄OB活动地装置在O轴上,如图9-19所示。在O轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB固连于一体。已知: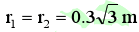 ,O1A=0.75m,AB=1.5m;又平衡杆的角速度ω=6rad/s。求当γ=60°且β=90°时,曲柄OB和齿轮Ⅰ的角速度。
,O1A=0.75m,AB=1.5m;又平衡杆的角速度ω=6rad/s。求当γ=60°且β=90°时,曲柄OB和齿轮Ⅰ的角速度。

第3题
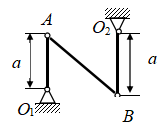
机构如图(a)所示。曲柄O1A绕O1轴转动,通过固连于连杆AB上的齿轮2带动齿轮1绕C轴转动。已知:O1A的角速度ω为常量,O1A=O2B=2r,且O1A∥O2B。两轮半径均为r。试求齿轮2和齿轮1分别在接触点P的速度和加速度。
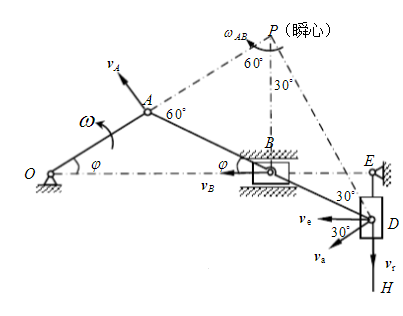
第4题
曲柄连杆机构带动摇杆EH绕E轴摆动,如图(a)所示,在连杆ABD上装有两个滑块,滑块B沿水平槽滑动,而滑块D则沿摇杆EH滑动。已知:曲柄OA以匀角速度ω逆时针转动,OA=AB=BD=r。在图示位置时,θ=30°,EH⊥OE。试求该瞬时摇杆EH的角速度ωE和角加速度αE。
第5题
在图示瓦特行星传动机构中,平衡杆O1A绕O1轴转动,并借连杆AB带动曲柄OB绕定轴O转动;在O轴上还装有齿轮Ⅰ.齿轮Ⅱ与连杆AB连为一体,并带动齿轮Ⅰ转动.已知r1=r2=0.3√3m,O1A=0.75m,AB=1.5m;又平衡杆的角速度ωO1=6rad/s.求当θ=60°和β=90°时.曲柄OB及齿轮Ⅰ的角速度。

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!