 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A.一定是稳定系统
B.是满足叠加原理的系统
C.是稳态误差为零的系统
D.是不满足叠加原理的系统
 更多“2. 线性控制系统()”相关的问题
更多“2. 线性控制系统()”相关的问题
第1题
A、带宽扩大 k 倍,响应速度加快k 倍
B、带宽扩大 k 倍,响应速度减慢k 倍
C、带宽扩大 k 倍,响应速度加快2k 倍
D、前三个都不对
第3题
将图8-2所示非线性系统结构图简化成非线性部分N(X)和等效的线性部分G(s)相串联的单位反馈控制系统结构图。

第5题
A.≦-7dBm
B.≦4dBm
C.≦-4dBm
D.≦-2dBm
第6题
火箭姿势控制的线性模型(忽略发动机的转动惯量)具有如下传递函数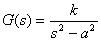 设k=1,a=1,开环系统很显然不稳定,所以需要设计控制器
设k=1,a=1,开环系统很显然不稳定,所以需要设计控制器 来使系统稳定,其结构图如题4-28图所示。(输入δ为推力的角度,输出θ是火箭的倾角)。
来使系统稳定,其结构图如题4-28图所示。(输入δ为推力的角度,输出θ是火箭的倾角)。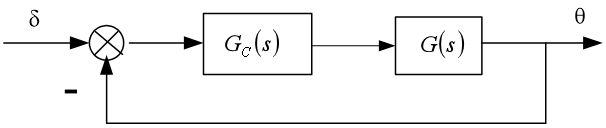 运用比例微分控制
运用比例微分控制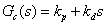 ,用根轨迹的方法,求出
,用根轨迹的方法,求出 和
和 的值,使闭环系统的误差带为2%时调整时间为4秒,且阻尼比
的值,使闭环系统的误差带为2%时调整时间为4秒,且阻尼比 ,正确的是()
,正确的是()
A、
B、
C、
D、
E、
第7题
当u=0,时,
;
当u=0,时,
要求:
(1)确定系统的状态转移矩阵Φ(t)。
(2)计算系统矩阵A。
(3)计算系统的特征值,判断此系统是否渐进稳定。
(4)若控制矩阵,该系统状态是否完全可控。
第8题
(1)Td=0时系统的运动;
(2)Td=0.5时系统的运动,并说明比例微分控制对改善系统性能的作用;
(3)Td=2时系统的运动。

第9题

第10题

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

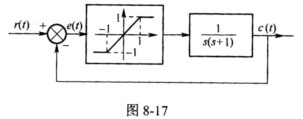 平面上绘制e(0)=2,
平面上绘制e(0)=2, (0)=0时的相轨迹图(要求将解题过程写清楚)。
(0)=0时的相轨迹图(要求将解题过程写清楚)。































