 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A.无穷大、无穷大
B.常值、常值
C.无穷大、常值
D.常值、无穷大
 更多“设单位反馈系统闭环稳定,被控对象和串联控制器的型别均为1时,若干扰为被控对象的输入端噪声或输出端噪声时,则加速度干扰作用下的稳态误差分别为 。”相关的问题
更多“设单位反馈系统闭环稳定,被控对象和串联控制器的型别均为1时,若干扰为被控对象的输入端噪声或输出端噪声时,则加速度干扰作用下的稳态误差分别为 。”相关的问题
第1题
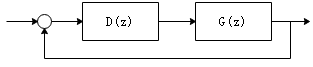 图示单位负反馈系统。假定数字被控对象
图示单位负反馈系统。假定数字被控对象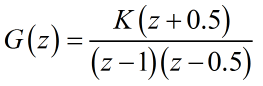 试设计数字控制器
试设计数字控制器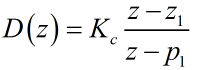 使系统满足如下指标:(1)静态速度误差系数为6;(2)闭环特征方程的主导极点近似等于0.5±0.707j。 备注:可以使用LabVIEW进行辅助设计
使系统满足如下指标:(1)静态速度误差系数为6;(2)闭环特征方程的主导极点近似等于0.5±0.707j。 备注:可以使用LabVIEW进行辅助设计
第2题
(1)写出校正后各系统的开环传递函数;
(2)分析各Gc(s)对系统的作用,并比较其优缺点。

第3题
已知单位负反馈系统被控对象的传递函数为: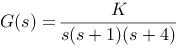 使用根轨迹法对系统进行超前串联校正设计,使之满足: (1)阶跃响应的超调量
使用根轨迹法对系统进行超前串联校正设计,使之满足: (1)阶跃响应的超调量 % (2)阶跃响应的调节时间不超过
% (2)阶跃响应的调节时间不超过
第6题
B、被控对象的模型参数一旦变化时,控制系统输出将发散
C、控制器的输出将发散,导致控制系统不稳定
D、控制系统的输出达到稳态时,将与输入存在较大的偏差
第7题
B、控制器的输出将发散,导致控制系统不稳定
C、控制系统的输出波动较大,不能快速的跟踪系统的输入
D、被控对象的模型参数一旦变化时,控制系统输出将发散
第10题

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































