 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
计算例2.25中旋转机器人的雅可比矩阵中的元素![计算例2.25中旋转机器人的雅可比矩阵中的元素[图]...计算例2.25中旋转机器人的雅可比矩阵中的](https://img2.soutiyun.com/shangxueba/ask/19371001-19374000/19373413/6cbd55a-chaoxing2016-195943.jpeg)
 更多“计算例2.25中旋转机器人的雅可比矩阵中的元素[图]...”相关的问题
更多“计算例2.25中旋转机器人的雅可比矩阵中的元素[图]...”相关的问题
第1题
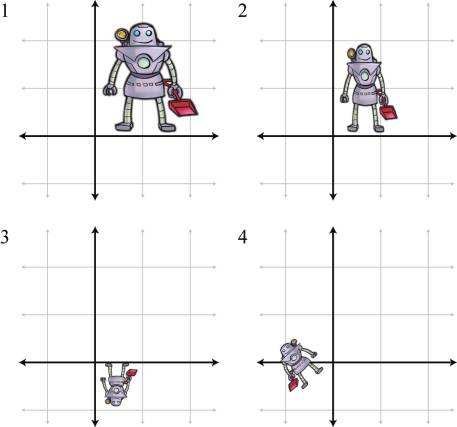 图中机器人的变换和下列矩阵: (a)
图中机器人的变换和下列矩阵: (a) , (b)
, (b) , (c)
, (c)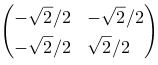 , (d)
, (d) . 正确的对应顺序是:
. 正确的对应顺序是:
A、(a) 3, (b) 1, (c) 4, (d) 2
B、(a) 3, (b) 1, (c) 2, (d) 4
C、(a) 1, (b) 3, (c) 4, (d) 2
D、(a) 3, (b) 4, (c) 1, (d) 2
第4题
 该示教器中的机器人图标表示什么?
该示教器中的机器人图标表示什么?
A、选择机器人的轴运动,可控制A1至A6轴6个轴运动
B、选择机器人的轴运动,可控制X、Y、Z、A、B、C六个轴的运动
C、选择机器人的世界坐标系下运动,可控制A1至A6轴6个轴运动
D、选择机器人的世界坐标系下运动,可控制X、Y、Z、A、B、C六个轴的运动
第5题
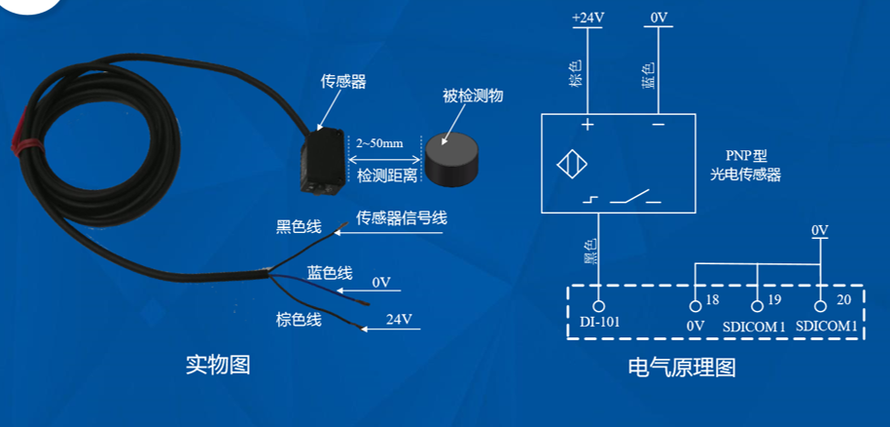
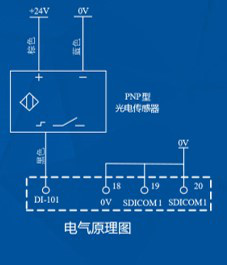 图中,传感器信号线接入的是机器人的( )。
图中,传感器信号线接入的是机器人的( )。
A、数字信号输入端
B、操作面板信号输入端
C、模拟型号输入端
D、机器人信号输入端
第6题
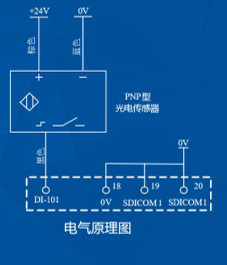 ,图中,光电传感器信号线接入的是机器人的( )。
,图中,光电传感器信号线接入的是机器人的( )。
A、数字信号输入端
B、模拟信号输入端
C、机器人输入端
D、外围设备输入端

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 该工业机器人图对应的运动简图是
该工业机器人图对应的运动简图是







 值,使系统阶跃响应的峰值时间
值,使系统阶跃响应的峰值时间 (s),超调量
(s),超调量 %=0.2%。
%=0.2%。





























