 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A.左半、远离
B.左半、靠近
C.右半、远离
D.右半、靠近
 更多“为了使系统稳定,闭环极点必须都在[s]平面上;为保证系统快速性好,应使系统响应衰减的快,则闭环极点都应虚轴。”相关的问题
更多“为了使系统稳定,闭环极点必须都在[s]平面上;为保证系统快速性好,应使系统响应衰减的快,则闭环极点都应虚轴。”相关的问题
第1题
B要系统快速性好,则闭环极点应远离实轴
C要平稳性好,则阻尼比为0.707
D闭环零点可以削弱或抵消附近的闭环极点作用
第5题
线性定常系统的传递函数为

试设计状态反馈矩阵K,将闭环极点配置在(-2,-1+j,-1-j)上。
第7题
设线性时不变系统的系统函数H(z)为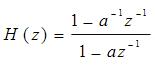 ,a为实数,
,a为实数,
(1)在z平面上用几何法证明该系统是全通网络,即|H(ejω)|=常数。
(2)参数a如何取值,才能使系统因果稳定?并画出其零、极点分布及收敛域。
第9题
B、表示闭环系统电动机的转速与电流(或转矩)的动态关系
C、表示闭环系统电动机的转速与电流(或转矩)的静态关系
D、表示闭环系统电动机的电压与电流(或转矩)的静态关系
E、各条开环机械特性上工作点ABCD点等组成

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!
































