重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
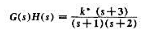
 ,则下列说法不正确的是()
,则下列说法不正确的是()A.只有实轴上存在根轨迹
B.起点为-2,-4
C.渐近线只有一条
D.没有无限零点
 更多“系统的开环传递函数为 [图],则下列说法不正确的是...”相关的问题
更多“系统的开环传递函数为 [图],则下列说法不正确的是...”相关的问题
第1题
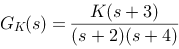
系统的开环传递函数为 ,则关于根轨迹说法不正确的是( )
,则关于根轨迹说法不正确的是( )
A、实轴上的根轨迹
B、根轨迹有4条分支
C、根轨迹有3条渐近线
D、根轨迹与虚轴的交点
第2题
系统开环传递函数为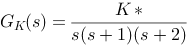 ,则关于根轨迹的说法正确的是( )。
,则关于根轨迹的说法正确的是( )。
A、根轨迹有3条分支
B、与虚轴相交时的两个闭环极点为
C、系统稳定的K*值范围0 <k*> <6> D、系统是不稳定的
第5题
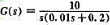
 (1)画出G(s)的完整奈氏图,用奈氏稳定判据判断闭环系统的稳定性。 (2)如果系统不稳定,试设计一种串联校正装置(给定参数),使闭环系统稳定。画出相应的完整奈氏图,并计算使闭环系统稳定的K的取值范围。
(1)画出G(s)的完整奈氏图,用奈氏稳定判据判断闭环系统的稳定性。 (2)如果系统不稳定,试设计一种串联校正装置(给定参数),使闭环系统稳定。画出相应的完整奈氏图,并计算使闭环系统稳定的K的取值范围。
第6题
(1)由所绘制的根轨迹图,说明对所有的Kg值(0<kg<∞)该系统总是不稳定的。
(2)在s=-α(0<α<2)处加一零点,由所作出的根轨迹,说明加零点后的系统是稳定的。
第7题
 试分析:
试分析:(1)系统是否满足超调虽σp%≤5%的要求?
(2)若不满足要求,可采用速度反馈进行改进,画出改进后系统的结构图,并确定速度反馈的参数。
(3)求出改进后系统在输入信号r(t)=2t作用下的稳态误差。
第9题
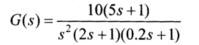 (1)用奈氏稳定判据判断闭环系统的稳定性。 (2)如果系统不稳定,试设计一串联校正装置,使闭环系统稳定。画出相应的完整奈氏图,并给出校正装置的参数。
(1)用奈氏稳定判据判断闭环系统的稳定性。 (2)如果系统不稳定,试设计一串联校正装置,使闭环系统稳定。画出相应的完整奈氏图,并给出校正装置的参数。
第10题
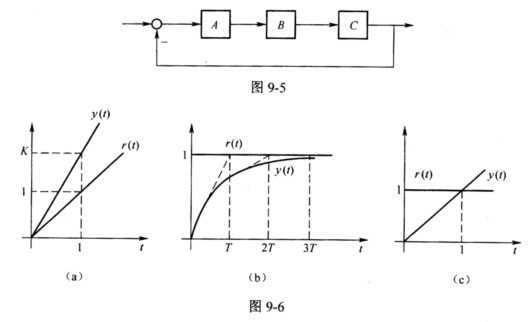 (1)该系统的三个环节A,B,C的传递函数是什么?开环系统的总传递函数是什么?画出其结构图。 (2)从结构图上选状态变量,写出状态空间表达式。 (3)当K=10,T=0.1时,求单位阶跃输入时系统的稳态误差和动态响应指标百分比超调σ%,上升时间ts,峰值时间tp。
(1)该系统的三个环节A,B,C的传递函数是什么?开环系统的总传递函数是什么?画出其结构图。 (2)从结构图上选状态变量,写出状态空间表达式。 (3)当K=10,T=0.1时,求单位阶跃输入时系统的稳态误差和动态响应指标百分比超调σ%,上升时间ts,峰值时间tp。

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

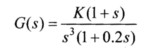
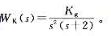
 ,则根轨迹渐近线与实轴夹角不正确的是( )
,则根轨迹渐近线与实轴夹角不正确的是( )