 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
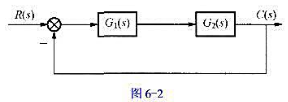
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
 更多“控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反”相关的问题
更多“控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反”相关的问题
第3题
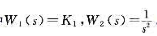 。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s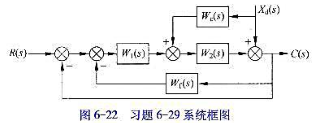
第4题
(1)当输入r(t)为单位阶跃函数,n(t)=0时,试选择K和Kt,使得闭环系统的超调虽σ%=40%,调整时间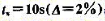 ;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
(2)设干扰n(t)=0,输入r(t)=t,试问K和Kt之值对稳态误差有何影响?
(3)设输入r(t)=0。当干扰n(t)为单位阶跃函数时,K和Kt之值对稳态误差有何影响?
第6题
(1)当K1=25和Kt=0时,系统的阻尼系数ξ,无阳尼自然振荡频率ωn以及系统对单位斜坡输入的稳态
误差ess;
(2)当K1=25和Kt=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,在单位斜坡输入信号作用下系统的稳态误差ess=0.1。试确定K1和Kt的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽,上升时间和调整时间。
第7题

第8题
某随动控制系统结构如图3-9所示。已知K1=40V/rad,K2=0.5rad/(V·s),T=0.2s,τ=2V/rad。试求:
(1)加入速度反馈前后闭环系统动态性能指标(调节时间和超调量);
(2)为使加入速度反馈后的闭环系统出现临界阻尼的非振荡阶跃响应,τ应取何值?
![]()
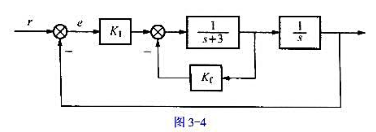
第9题
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!



































